Sometimes people ask me if, when I started this project 4 years ago,
I expected BehaviorTree.CPP to gain so much adoption in the robotic community.
Even if that is generally meant as a rhetorical question that expects and humble answer,
I usually answer "yes".
There are a few reasons why I was optimistic about the fact that this
library might be well received:
It helps implement a crucial component of a robotic software system,
Task Planning; this part is often neglected until the end of the project.
I spent an unusual amount of time (maybe 30% of my whole development time)
writing documentation.
I wanted to build an inclusive project, where people's needs and opinions are heard.
I am the "benevolent dictator" of the project, but I do listen and I do learn from others!
Adoption in recent years,
BT.CPP is gaining traction in robotics, as shown in the image
below (note as the Y-axis is logarithmic):
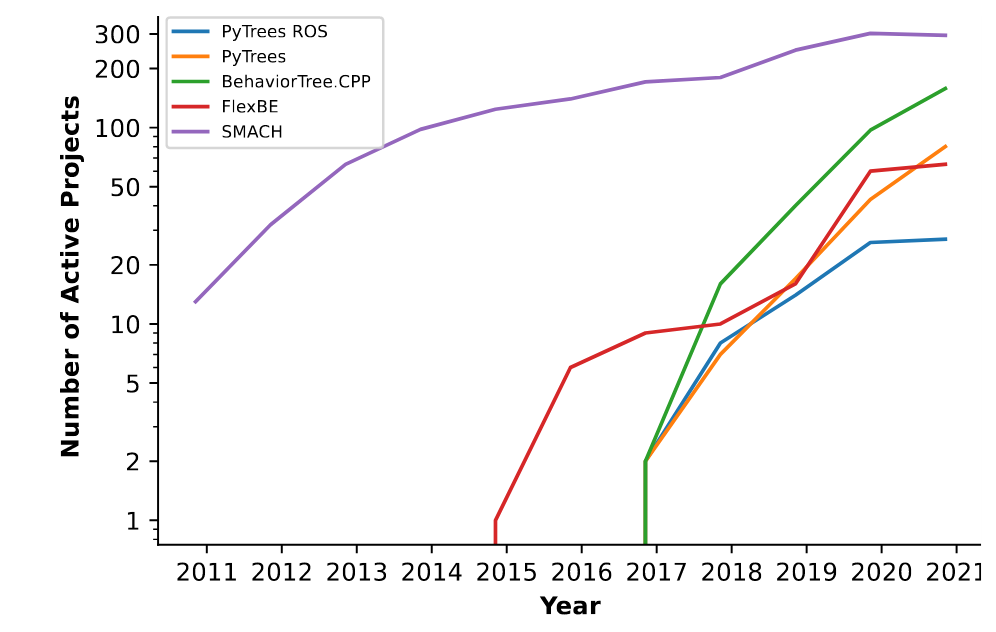
This data was obtained from the paper:
Behavior Trees and State Machines in Robotics Applications
SMACH is still the strongest contender,
but you can also note as BT.CPP and PyTrees
have gained more and more popularity in our community.
If you want to learn more about the
methodology used to obtain these numbers,
please refer to the publication mentioned above.
Documentation is a super power
You might be familiar with the phrase:
"If a tree falls in a forest
and no one is around to hear it, does it make a sound?"
My personal version of it is:
If an open source software is not used by anyone else but the author, is it still useful?
In both cases, we know that the answer is (or might be) "yes", but hopefully you see what I mean.
Very often, open source is about "scratching your own itch" and sharing what you did with others. That is fine!
But in my case, This project was created specifically to help others; the more it is adopted and used, the more
I feel that my initial goal has been achieved.
In my career, I have learned that the best way to drive adoption is:
- built something that people need.
- build trust with your users.
- lower as much as possible the entry barrier.
The latter point is particularly important and it is often underestimated.
For me, lowering the entry barrier involved three key steps:
- writing good documentation (this website).
- adding tutorials that give the new users a sense of progression.
- providing a tool that helps people learn visually (Groot).
The documentation of BT.CPP is not perfect, but probably a little above the average,
considering the average open source project: this cost a lot of time, but paid off enormously.
If you have any suggestions about how to improve this site,
let me know.